Products

MG Urethane Conformal Coating - 1.86 fl. oz. Bottle
MG Chemicals 4223F-55ML Urethane Conformal Coating The MG Chemicals 4223F-55ML Urethane Conformal Coating is a high-performance protective coating designed to safeguard electronic circuits from moisture, dirt, dust, chemicals, and thermal shocks. This urethane-based coating is ideal for use in harsh environments, offering excellent dielectric properties and superior chemical resistance. The 55ml bottle provides a convenient amount for various applications, ensuring reliable protection for your electronic assemblies. Features Excellent Protection: Provides a robust barrier against moisture, chemicals, dirt, dust, and thermal shocks. High Dielectric Strength: Ensures reliable electrical insulation of components. Superior Chemical Resistance: Ideal for use in harsh and chemically aggressive environments. Flexible and Durable: Retains flexibility over a wide temperature range without cracking or peeling. Convenient Application: 55ml bottle with brush cap for easy and precise application. RoHS Compliant: Meets environmental regulations for hazardous substances. Specifications Volume: 55ml Base Material: Urethane Color: Clear Dielectric Strength: 1500 V/mil (ASTM D-149) Operating Temperature Range: -40°C to 120°C (-40°F to 248°F) Curing Time: Tack-free in 10 minutes, fully cured in 48 hours Chemical Resistance: Resistant to water, alcohols, acids, alkalis, and aliphatic hydrocarbons Applications: Protects PCBs, sensors, LEDs, and other electronic components from environmental hazards Example Use Scenario The MG Chemicals 4223F-55ML Urethane Conformal Coating is ideal for protecting a PCB used in outdoor or industrial environments. For instance, when applied to the control circuitry of outdoor LED lighting, this coating ensures that the electronics remain unaffected by moisture, dust, and chemical exposure, thus extending the life and reliability of the product. How to Use MG Chemicals 4223F-55ML Urethane Conformal Coating Preparation: Ensure the surface to be coated is clean and free of grease, dirt, or other contaminants. Use isopropyl alcohol and a lint-free cloth for cleaning if necessary. Protect areas that should not be coated with masking tape. Application: Shake the bottle well before use to ensure the coating is well-mixed. Use the brush cap to apply an even layer of the coating to the desired areas. Apply in a well-ventilated area or under an extraction hood. Curing: Allow the coating to air-dry for about 10 minutes until tack-free. For best results, allow the coating to fully cure for 48 hours. Curing can be accelerated by applying mild heat (up to 60°C/140°F) to the coated area. Inspection: Inspect the coated area to ensure complete coverage and uniform thickness. If additional protection is needed, apply a second coat after the first layer has dried. Final Use: Once fully cured, the coated electronic assembly is ready for deployment in its intended environment. Additional Information Tri-Tek Electronics is an authorized distributor of MG Chemicals products, ensuring you receive full manufacturer warranty coverage and the best pricing and factory support.
$21.73 $17.39
Pan Pacific USB "B" FEMALE PCB
$1.56 $1.11

Simplified MFG USB 2.0 Extender 40m Over UTP Kit (USB 3.0 Camera Compatible)
Simplified Mfg. EXUSB2.0 USB 2.0 Extender 40m Over UTP Kit (USB 3.0 Camera Compatible) The Simplified Manufacturing EXUSB2.0 USB 2.0 Extender Kit provides a reliable and cost-effective solution for extending USB connectivity up to 40 meters (131 feet) over standard UTP cabling. Designed and supported by Simplified Manufacturing, this extender kit is ideal for professional AV, security, and low-voltage installations where USB devices must be located far from the host computer. This kit supports USB 2.0 data rates and is fully compatible with many USB 3.0 web cameras operating in USB 2.0 mode, making it an excellent choice for conference rooms, classrooms, control rooms, kiosks, and surveillance monitoring stations. By using common Cat5e or Cat6 cable, installers can achieve clean, flexible, and code-compliant USB extensions without bulky active cables. Tri-Tek Electronics is an authorized distributor of Simplified Manufacturing products, ensuring full manufacturer warranty, factory support, and best-value pricing. Local installers benefit from expert assistance and product availability at our Mesa, Arizona retail location, serving the greater Phoenix metro area. Key Features Extends USB 2.0 signals up to 40 meters over UTP cable Compatible with USB 3.0 web cameras operating in USB 2.0 mode Uses standard Cat5e or Cat6 solid copper cabling Plug-and-play operation with no driver installation required Compact transmitter and receiver units for easy integration Ideal for AV, security, and commercial USB applications Specifications Manufacturer Part Number: EXUSB2.0 USB Standard: USB 2.0 Maximum Extension Distance: 40 m (131 ft) Cabling Type: Cat5e / Cat6 UTP (solid conductor recommended) Supported Devices: Web cameras, keyboards, mice, touchscreens, USB peripherals Kit Includes: Local transmitter and remote receiver Typical Installation / Usage Scenario The EXUSB2.0 extender kit is commonly used in conference rooms and classrooms where a USB camera or interactive device must be mounted near a display while the PC is located in a rack or credenza. Installers simply connect the transmitter to the host computer, run Cat5e or Cat6 cable through walls or conduit, and connect the receiver at the remote device for a clean, professional installation. Ideal For AV integrators and low-voltage contractors Conference rooms and training facilities Security monitoring and control rooms Digital signage, kiosks, and interactive displays Tri-Tek Electronics proudly supports installers throughout Phoenix, Mesa, Chandler, Tempe, Gilbert, Scottsdale, and Glendale, offering trusted products backed by local expertise and inventory.
$199.99

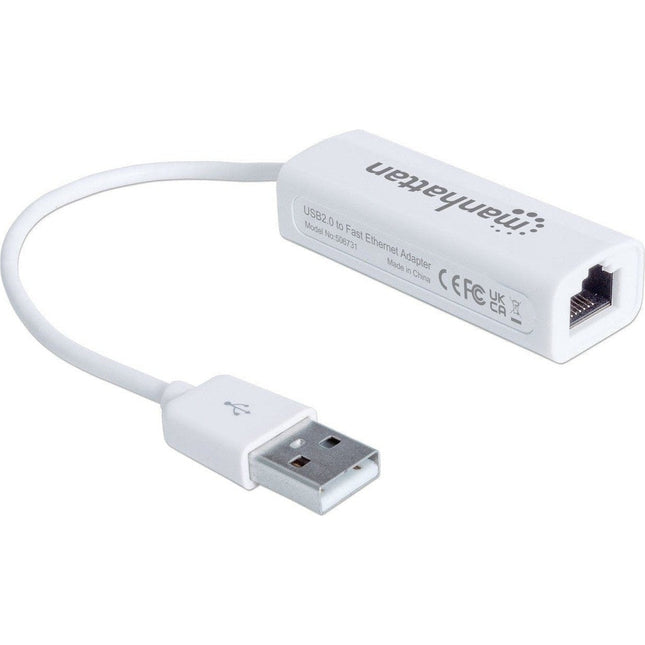
Manhattan USB 2.0 to 10/100 Fast Ethernet Adapter
Manhattan 506731 USB 2.0 Fast Ethernet Adapter The Manhattan 506731 USB 2.0 Fast Ethernet Adapter provides an easy and cost-effective way to add an Ethernet port to a laptop, desktop, or other USB-enabled device that lacks built-in network connectivity. This adapter supports up to 100 Mbps Ethernet speeds, allowing for reliable wired internet access that ensures stable data transmission, ideal for streaming, online meetings, and high-bandwidth applications. Compact and lightweight, this adapter is a great companion for travelers, students, or professionals needing fast internet access on the go. Key Features Fast 100 Mbps Ethernet: Provides stable, wired network access with data transfer rates up to 100 Mbps. Plug-and-Play Installation: Easy to set up with no additional drivers required for most operating systems. USB 2.0 Interface: Universally compatible with USB 2.0 ports, ensuring versatile use across many devices. Compact Design: Lightweight and portable, ideal for mobile users needing network access on the go. LED Status Indicators: Displays connection and activity status for easy network monitoring. Example Use Case For users with ultrabooks, tablets, or devices without an Ethernet port, the Manhattan 506731 adapter provides reliable wired internet access, perfect for stable streaming or downloading. A great solution for professionals working remotely in locations where wireless signals may be unreliable, this adapter ensures consistent connectivity and ease of use with a simple plug-and-play setup. Specifications Interface: USB 2.0, compatible with USB 1.1 and 1.0 Network Standards: 10/100 Mbps Ethernet Compatibility: Windows, Mac OS, Linux LED Indicators: Link and Activity LEDs Dimensions: Compact and travel-friendly for convenient portability Tri-Tek Electronics is an authorized distributor for Manhattan, ensuring full manufacturer warranty coverage and competitive pricing. Visit our Mesa, AZ retail location or contact us for the best in product availability and support.
$19.99 $18.99

Manhattan USB 2.0 Type-C to Type-A Adapter
ICI354653, USB 2.0 Type-C to Type-A Adapter Type-C Female to Type-A Male, Black USB-A adapter for use with USB-C cables Connects USB-C cable or device — i.e. hub, card reader, etc. — to Type-A port, allowing devices to charge and sync Supports speeds up to 480 Mbps and 3 A charging Connect new technology to legacy. The Manhattan USB 2.0 Type-C to Type-A Adapter is an ultra-compact adapter that allows a USB-C cable or device to connect to a USB Type-A port. Measuring only 27 millimeters (1 in.), the adapter is designed with portability and simplicity in mind. With charge and sync capabilities at up to 3 A and 480 Mbps respectively, you will quickly and easily keep your device ready for whatever is next. Features: USB-A adapter for use with USB-C cables Connects USB-C cable or device — i.e. hub, card reader, etc. — to Type-A port, allowing devices to charge and sync Supports speeds up to 480 Mbps and 3 A charging Nickel-plated connections for best performance Ultra-compact, portable design Lifetime Warranty Standards and Certifications USB 2.0 USB 3.1 General Nickel plated Molded ABS boot 56K Ω resistor Connections One 5-pin USB Type-A (male) One 24-pin USB Type-C (female) Electrical Insulation resistance: 5M Ω Contact resistance: 2 Ω Physical 27 x 17 x 10 mm (1 x 0.7 x 0.4 in.) 7.5 g (0.3 oz) Operating Environment Operation Temperature: 32 – 104°F (0 – 40°C) Storage Temperature: -4 – 140°F (-20 – 60°C) Humidity (noncondensing): 0 – 96% Package contents USB 2.0 Type-C to Type-A Adapter Download the Spec sheet (*.pdf)
$8.99 $3.79
Pan Pacific USB 3.0 A TO A 15 ft CABLE
$30.99 $22.89
Pan Pacific USB 3.0 A TO B 3 ft CABLE
$9.49 $6.79

Signamax USB 3.0 Keystone Module Keystone Module, White
Signamax CMK‑USB3‑SAA‑WH USB 3.0 Keystone Module (White) Product Overview A USB 3.0 A-to-A feed‑thru keystone module designed to seamlessly connect USB‑enabled equipment via keystone-style ports. Ideal for use in wall outlets, patch panels, and structured cabling workstations. Key Features USB 3.0 A‑to‑A feed‑thru socket‑to‑socket design ensures a fast and reliable connection Keystone form factor enables easy integration into standard keystone plates and panels Gold-plated contacts provide superior conductivity and corrosion resistance Nickel-plated body with ABS (UL94V‑0) housing offers durability and meets safety standards High-performance electrical specs: Maximum contact resistance ~30 mΩ; insulation resistance ≥ 100 MΩ at 500 Vdc; dielectric strength 500 Vac for 1 min Compact dimensions: Approximately 40.0 × 19.7 × 16.5 mm (1.58 × 0.77 × 0.65 in) Wide temperature range: Operation from −10 °C to +60 °C; storage from −40 °C to +70 °C Compliance: USB 3.0 standard and UL94V‑0 flammability rating 5‑year limited component warranty provides long-term reliability Applications & Installer Value Perfect for AV technicians, IT professionals, and structured cabling installers, this module simplifies setup by extending USB 3.0 connectivity to wall plates and patch panels. It ensures high-speed data link integrity and blends seamlessly with structured cabling systems. Availability & Installer Flexibility Available for immediate dispatch, packed individually or in bulk quantities Ideal for network upgrades, media installations, and standard cabling layouts Tri‑Tek Electronics is an authorized distributor of Signamax products. We provide full manufacturer warranty support, competitive pricing, and expert technical assistance. Visit our Mesa, Arizona location for local pickup and personalized service.
$9.72 $7.48


Manhattan USB 3.1 Gen 2 Type-A Male to Type-C Female SuperSpeed+ USB-C Adapter
Manhattan 354714 SuperSpeed+ USB-C Adapter – Fast and Versatile Connectivity The Manhattan SuperSpeed+ USB-C Adapter (354714) allows you to connect USB-C devices to older USB Type-A ports while supporting both USB 2.0 and USB 3.0 standards. This adapter ensures compatibility with legacy systems while offering fast data transfers and charging capabilities, making it a must-have for anyone integrating newer technology with existing hardware. Key Features: USB 3.2 Gen 2 Support: Enables transfer speeds up to 10 Gbps for high-speed data transfers when connected to USB 3.0 ports, while remaining fully backward compatible with USB 2.0 for slower speeds. Compact Design: Ultra-portable at only 27 mm (1 inch), perfect for use on-the-go. Charge and Sync: Supports up to 3 A charging for devices like smartphones, tablets, or USB-C hubs. Durable Build: Nickel-plated connectors and a molded ABS boot ensure long-lasting performance. Universal Compatibility: Connects USB-C devices to any USB-A port, supporting USB 2.0, USB 3.0, and USB 3.2 Gen 2 standards for maximum versatility. This adapter is ideal for users looking to connect and charge their USB-C devices while ensuring full compatibility with older USB ports, including USB 2.0. Specifications: Connectors: One 9-pin USB-A (male) and one 24-pin USB-C (female) Backward Compatibility: Supports USB 2.0, USB 3.0, and USB 3.2 Gen 2 Operating Environment: 0 – 40°C (32 – 104°F) Dimensions: 27 x 17 x 10 mm Weight: 8.5 g Available at Tri-Tek Electronics in Mesa, AZ, the adapter comes with a lifetime warranty for complete peace of mind.
$9.99 $8.99


Manhattan USB 3.2 Type-C 4K@60Hz USB-C to HDMI Adapter
Manhattan 4K@60Hz USB-C to HDMI Adapter (Model 153973) The Manhattan 4K@60Hz USB-C to HDMI Adapter (Model Number: 153973) facilitates a seamless connection between USB-C devices and HDMI displays, delivering high-quality video output for both professional and personal applications. Key Features: Ultra High-Definition Video Output: Supports resolutions up to 4K@60Hz (3840×2160), ensuring crisp and vibrant visuals. Plug-and-Play Convenience: Requires no additional drivers or external power; simply connect to your USB-C device and HDMI display for immediate functionality. Wide Device Compatibility: Compatible with USB-C devices that support DisplayPort Alternate Mode (DP Alt Mode), including smartphones, Apple® MacBooks®, Chromebooks™, Pixels™, tablets, and more. Durable Aluminum Design: Features a sleek, space gray aluminum housing that is both sturdy and portable, ideal for travel and daily use. Specifications: Input: USB 3.2 Type-C Male Output: HDMI Female Supported Resolutions: 720p, 1080i, 1080p, 4K@30Hz, 4K@60Hz Cable Length: 11 cm (4 in.) Housing Material: Aluminum Operating Systems: Compatible with Windows®, macOS®, Linux®, Chrome OS™, iPadOS®, and Android™ Usage Scenario: Imagine you're a professional in Phoenix, Arizona, needing to connect your USB-C-equipped laptop to an HDMI projector for a high-resolution presentation. This adapter offers a straightforward, plug-and-play solution, ensuring your visuals are displayed in stunning 4K clarity without the need for additional drivers or power sources. Tri-Tek Electronics, an authorized distributor located in Mesa, AZ, provides this Manhattan adapter, ensuring full manufacturer warranty coverage, competitive pricing, and factory support. By choosing Tri-Tek Electronics, you are guaranteed genuine products backed by reliable customer service.
$28.99

$1.56 $1.11

Pan Pacific USB A Female PCB Vertical 180 Degree PCB Socket
Pan Pacific USB-PAF-V-P, USB "A" Female PCB Vertical 180°
$1.56 $1.11











